

一、发展背景
(一)智能交通系统及车联网发展简述
智能交通系统(ITS)是对通信、控制和信息处理技术在运输系统中集成应用的统称,是一种通过人、车、路的密切配合来保障安全、提高效率、改善环境和节约能源的综合运输系统。
我国智能交通系统的发展共分为三个阶段:起步阶段(2000年之前),实质性建设阶段(2000—2005年),高速发展阶段(2005年至今)。起步阶段主要进行城市交通信号控制的相关基础性研究,进一步建立了电子收费系统、交通管理系统等示范点,使得智能交通系统进入推广应用和改进阶段,但整体水平滞后。在实质性建设阶段,国家投入大量资金进行ITS的研发、生产和普及,为ITS的发展创造了有利条件。高速发展阶段,随着人工智能、自动驾驶、车联网等技术的快速发展,以建设“智慧城市”、“绿色城市”和“平安城市”为目标,我国ITS技术得到了进一步发展和更为广泛的应用。
近年来,以自动驾驶为代表的新兴技术快速发展,已成为未来智能交通系统中不可或缺的关键技术之一。美国机动车工程师学会(SAE)将自动驾驶分为从0到5共六个级别,级别越高,自主化驾驶程度越高。为提高自动驾驶车辆的安全性,车辆通常搭载多种传感器,如光学摄像机、超声波雷达、毫米波雷达以及激光雷达等,以此来提高单车的环境感知能力,有助于车辆的行程控制、安全驾驶预判等操作。此外,5G车联网等技术的发展也为车与车之间的智能协同提供了多种通信技术手段,助力自动驾驶技术发展。
1.基于超视距感知的智能车联系统的必要性
近年来世界各大车企和研究所通过在车辆搭载多种传感器来增强车辆的环境感知能力,对路况数据进行采集,并利用机器学习等算法进行离线学习和在线决策相结合的方法,实现提高自动驾驶的安全性和可靠性的目标。然而,由于车辆传感器(如:雷达、光学摄像机)易受障碍物、雨雪天气、强弱光线等多种因素的影响,导致基于单车传感器的环境信息感知能力受限,易发生车辆碰撞及因物体识别故障导致的自动驾驶事故。因此,亟须通过智能车联技术对超视距感知能力进行增强,突破单车传感器环境感知能力受限的技术瓶颈,提高自动驾驶的安全性和可靠性。与此同时,为满足面向超视距感知的车间信息共享的低时延和高速率传输要求,本文提出了一种基于毫米波频段时域资源动态共享的感知通信一体化智能车联传输系统,以保证车间感知信息宽带可靠共享。并针对感知和通信的业务优先级,设计了动态时间分配和灵活波束控制算法,优化感知通信一体化系统的整体性能。设计并研发了基于毫米波技术的感知通信一体化智能车联系统验证平台,实现了核心功能和关键技术的原理性验证。
二、感知通信一体化智能车联系统设计面临的挑战
为了提高自动驾驶车辆的超视距环境感知能力,通过多车协同实现感知信息的融合是实现途径之一。为克服现阶段多车间传感器信息融合所面临的信息格式迥异、融合效率低等难题,亟须通过感知和通信系统的联合设计来提高车辆间信息融合的智能化水平,保障自动驾驶对环境感知能力提升和信息时效性融合的要求。下面分别介绍面向超视距感知的智能车联系统典型应用场景以及感知通信一体化设计所面临的挑战。
(一) 面向超视距感知的智能车联系统典型应用场景
图1为面向超视距感知的多车协同智能车联系统的典型应用场景。其中,车辆B、D和E是可由车辆A的雷达传感器直接探测到的车辆目标。但是,由于受到前方车辆B和D的遮挡,车辆A的感知范围受到极大限制,导致车辆C和F处于车辆A的盲区。因此,为扩展车辆A的雷达传感器探测距离和范围,通过采用毫米波宽带传输技术将车辆B和D的雷达感知信息回传给车辆A,并由车辆A进行多源信息融合,来提升车辆A的超视距感知能力,从而提高智能车联系统的安全性和可靠性。

图1 面向超视距感知的多车协同智能车联系统的典型应用场景
(二)感知通信一体化智能车联系统设计面临的挑战
虽然采用多车协同的智能车联系统可以提高环境信息感知能力,但是感知通信多系统的一体化设计却面临诸多挑战。首先,感知与通信的信号形式、信号处理机制、系统性能评估参数各不相同。因此,如何设计有效的系统性能评估方法至关重要。其次,车辆间多种时延敏感的感知数据的融合受限于多种软件和差异化硬件平台,如何实现感知信息的快速融合以满足低时延、高可靠的信息传输要求,也是一体化系统设计面临的难题之一。最后,针对高移动性车联网场景,如何实现毫米波宽带通信的快速波束对准和波束追踪,是保障感知数据宽带传输可靠性所面临的又一难题。
三、感知通信一体化智能车联系统设计框架
(一)感知通信一体化系统设计框架
针对智能车联系统设计面临的高速率、低时延传感信息融合的挑战,本文提出了基于感知通信一体化设计的智能车联系统框架(见图2),以实现多车协同超视距感知的目标。
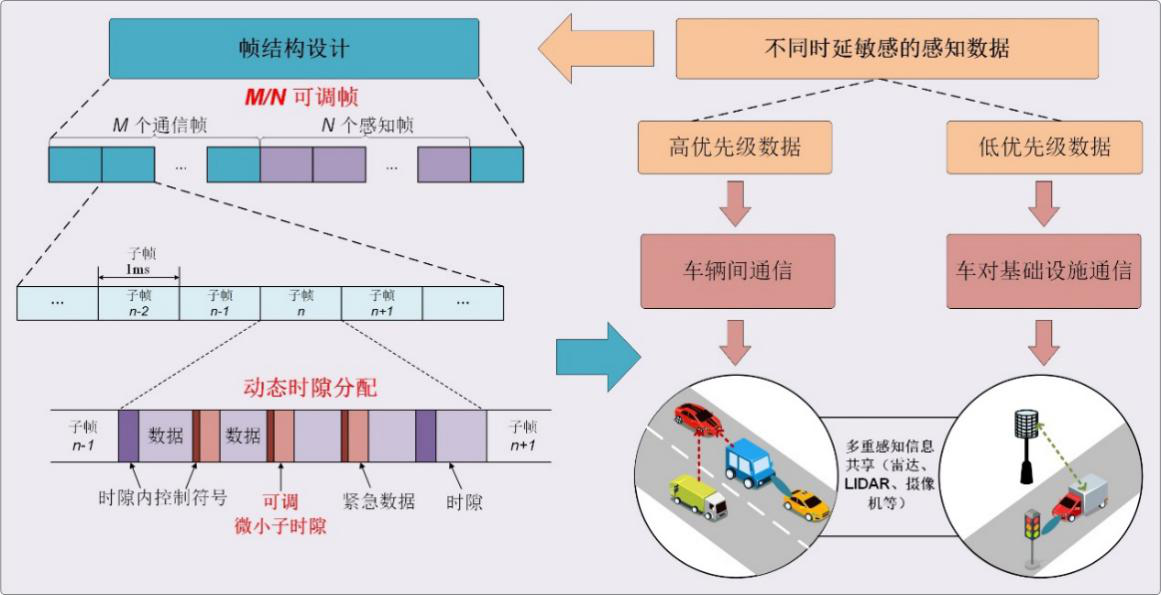
图2 基于感知通信一体化设计的智能车联系统框架
首先,车辆通过多传感器获取的环境信息具有不同的优先级,将时延敏感的感知信息分为高优先级数据和低优先级数据,并通过能力不同的通信技术分别进行传输。例如:高优先级的数据对时延、数据速率的要求较高,可以通过车—车直连的宽带链路进行传输;低优先级的数据对时延、数据速率要求较低,可以通过车辆到基础设施的中低速率链路进行传输。此外,还可以结合感知信息时延敏感度不同的特性对感知和通信两系统的帧长占比情况进行动态灵活配置,提出感知通信一体化系统中时隙动态可调帧结构方法。除帧结构中用于控制信令传输的时隙之外,针对时延敏感度高的信息采用短子帧,而对时延敏感度低的信息采用长子帧,信息传输过程中也可以根据业务需求对子帧长度进行动态配置,并结合车间通信采用的毫米波技术特点,提出毫米波波束快速对准与追踪技术,优化波束搜索空间维度和算法的复杂度,满足时延敏感信息的快速可靠传输需求。
(二)感知通信一体化系统评估指标
针对感知通信一体化系统设计面临的诸多挑战,为有效评估所设计的一体化系统的性能,亟需能够科学分析和度量感知通信两系统融合所带来的性能提升与开销的性能指标。传统的两系统融合的评估方法是将其中一个系统的性能指标转换为另外一个系统的指标。考虑到感知信息种类和方式的多样性,以雷达感知数据为例,雷达信息估计率可以用随机参数的熵和雷达估计不确定性的熵来表示,可类比于基于信息熵的通信系统数据速率的表示理论。另外,基于最小均方误差的通信度量的变体形式可以将通信指标转换为类似于雷达估计克拉美罗界形式的有效度量指标。因此,感知通信一体化系统中的统一度量和评估的指标是进行两系统融合性能评估不可或缺的关键性指标,需要考虑一体化系统的多重功能进行联合设计。
(三)任务驱动的动态时隙分配帧结构
不同传感信息传输的方法在很大程度上取决于业务的时延敏感度和优先级。例如,汽车碰撞和道路安全危险报警属于紧急类感知信息,对于自动驾驶车辆而言具有高优先级,通过车辆间的毫米波链路传输来保证低时延信息传输要求。另一方面,例如:交通拥堵、最佳路线规划和娱乐视频等低优先级信息,可以通过车辆到基础设施通信链路来传输,因其优先级相对紧急类感知信息较低。与此同时,通过使用基于灵活时隙分配的动态帧结构能够满足不同优先级、时延敏感和非敏感等业务需求,保证低时延和高可靠数据传输。为此,本文提出一种面向感知通知一体化智能车联系统的基于5G新空口的新型帧结构,提供灵活的帧结构配置方法,实现感知和通信功能的按需时隙灵活动态配置,帧结构设计如图2所示。另外,考虑到存在传输紧急信息(如交通事故、行人横穿马路等紧急事件)的需求,本文还设计了基于微小子时隙的动态子帧时隙配置方法,以保障低时延信息传输。
(四)基于博弈论的资源分配方法
为使感知通信一体化系统中的感知和通信所占用的传输时间能够根据时延敏感性业务的需求进行动态调整,将帧结构划分为可动态变化的感知功能子帧和通信功能子帧,如图2所示。以雷达感知为例,对于一帧而言,如果雷达探测持续时间较长,则通信传输持续时间将变短;另一方面,感知与通信两种不同的功能所占用的时间与其性能密切相关。此外,雷达感知的信息需要尽可能地在后续通信传输时间内得到有效的传输,否则将失去雷达感知信息的时效性。因此,雷达持续时间与通信传输时间之间是一种相互制约的关系,可以采用非合作博弈理论和方法对时间资源进行优化分配,实现感知与通信一体化系统性能的最优化。对基于时分的感知通信一体化系统进行时间资源分配,需要在雷达信息量不大于通信信息量的限制条件下,对不同雷达持续时间配比情况下的雷达信息量进行优化,找到最优的雷达通信持续时间配比,实现雷达与通信传输信息量的联合最优化,提升车辆的环境感知性能和多车感知数据的传输与融合性能。
(五)基于强化学习的灵活波束控制方法
为解决车辆间高带宽大流量感知信息的有效传输与融合的难题,本文提出可以通过采用毫米波波束控制方法与技术实现车间可靠信息传输。毫米波通信技术采用大规模相控阵天线和波束成形技术来增强接收器处的信号强度以克服信号的损耗和衰减问题。此外,前一时隙中的雷达感知信息可以用于辅助车辆间的波束对准和波束追踪过程,有效降低波束调控的时间开销。在波束对准过程中,车辆之间的位置关系可从雷达感知信息中获得,对感知信息加以利用可以最小化波束搜索空间并有效降低波束对准的时间。并基于雷达感知信息中包含的车辆速度和轨迹等信息,设计了基于强化学习的波束追踪算法,实现车辆移动场景下波束的快速切换,保证车辆间的通信链路可靠性和链路连接稳定性。
四、感知通信一体化智能车联系统验证平台
因为工作于20~30GHz毫米波频段的短程雷达和中程雷达系统已在车辆防撞和盲点检测中得到广泛应用。为此本文设计并搭建了工作于26 GHz毫米波频段的感知通信一体化验证平台,通过聚合8个100 MHz载波频段来得到800 MHz的宽带毫米波通信带宽,以验证所提出的感知通信一体化系统的核心功能和关键技术。该平台收发两端采用了具有64阵元的毫米波相控阵天线,验证快速波束对准和波束追踪算法的性能和可行性,如图3所示。
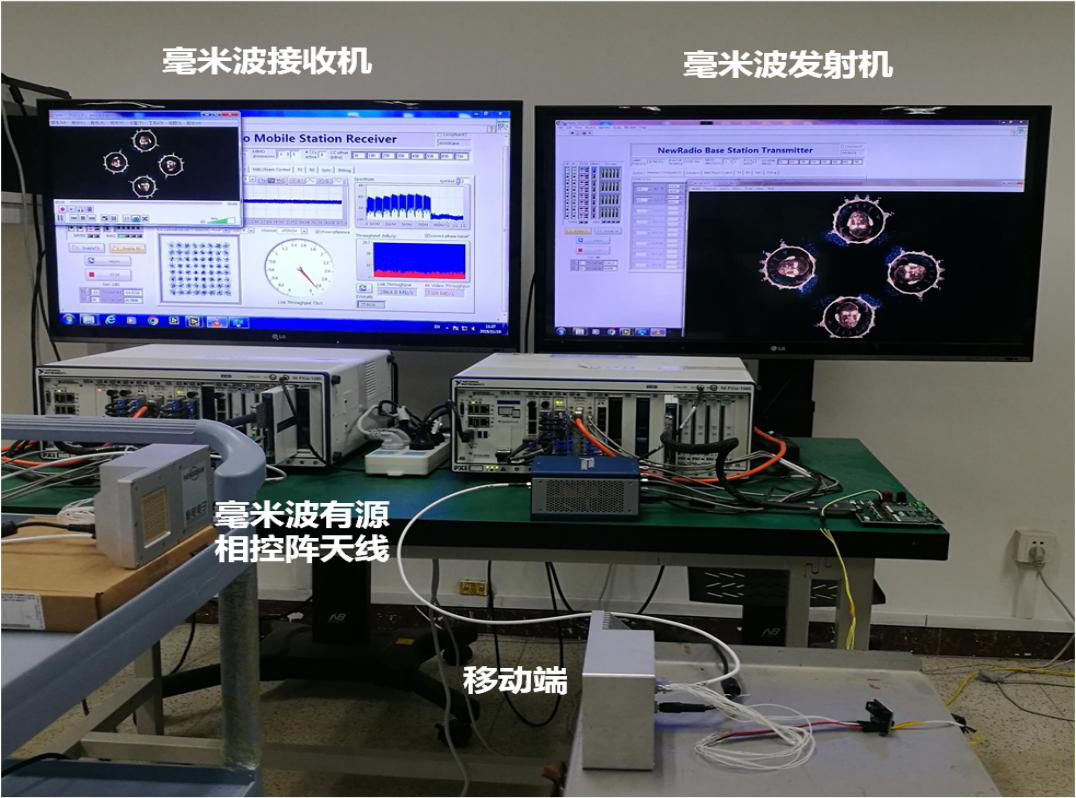
图3 感知通信一体化系统测试平台
感知通信一体化测试平台的结果如图4所示,车辆A的雷达感知结果表示车辆B、D和E存在于距离车辆A分别为18米、14米和30米处,但由于车辆遮挡了雷达探测信号,车辆C和F处于车辆A的盲区。车辆B和D分别通过各自的雷达感知到车辆C和F的位置信息,并通过毫米波宽带通信链路与车辆A共享车辆B和D的信息。最终,通过整合来自车辆B和D的雷达感知信息,提高了车辆A的环境感知能力,实现了超视距感知。
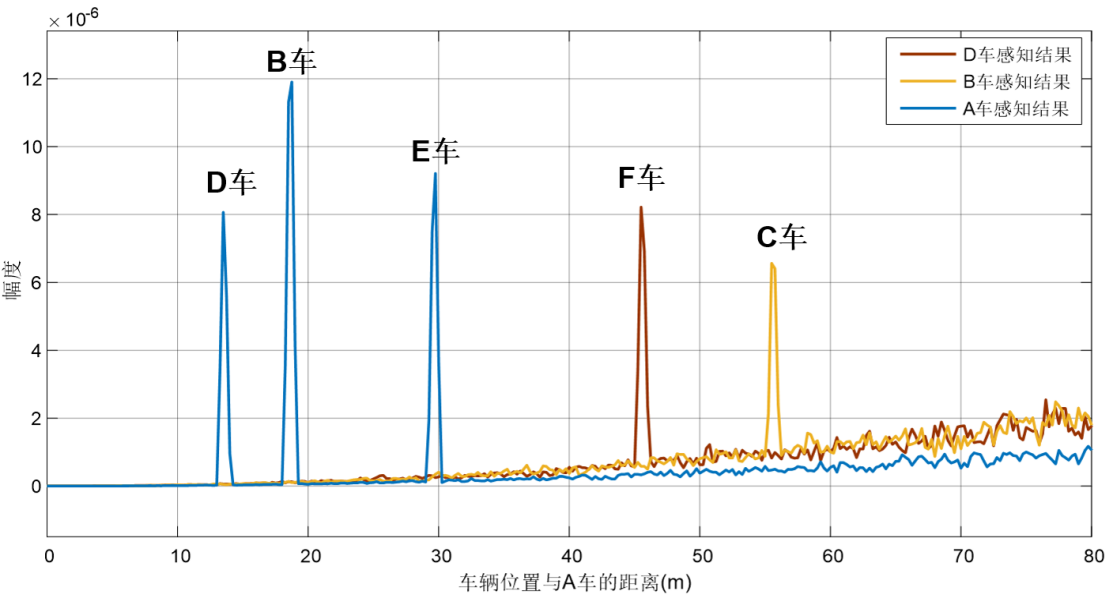
图4 感知通信一体化测试平台的结果
五、未来技术展望
随着人工智能技术的不断成熟和广泛应用,自动驾驶、多车协同虚拟现实以及增强现实信息融合等技术,将有望扩大单车感知视野、提升单车感知能力,提高车联系统的安全性和智能化水平。考虑到自动驾驶汽车的快速发展势头,面向超视距感知的感知通信一体化智能车联系统将全面突破单车感知能力瓶颈,通过多车协同、感知和通信系统融合等方式,提高智能车联系统的安全性和可靠性,并将成为未来五到十年内本领域的研究热点。
(作者:北京邮电大学 泛网无线通信教育部重点实验室 )
